Categorías
- Audio
-
Automóvil
- Actuadores
- Adaptadores
- Alarmas y GPS
- Amplificadores
- Antenas
- Arneses
- Bocinas Auto
- Cargadores Auto
- CB
- Conectores de Automóvil
- Convertidores de Impedancia
- Epicentros
- Extensiones
- Focos y Porta Focos Automotriz
- Frentes o Soportes para Autoestereo
- Fusibles y Porta Fusibles Automotriz
- Inversores
- Kits Instalación
- Módulos LED Automóvil
- Supresor de Ruido
- Switches Automóvil
- Terminales Auto
- Transmisores FM y Bluetooth
- Cables
- Celulares
- Computación y Redes
-
Energía
- Abanicos y Aire Acondicionado
- Baterías
- Cargadores
- Cinta de Aislar
- Clavijas, Contactos y Adaptadores
- Conectores
- Elevadores y Reductores
- Extensiones
- Focos y Porta Focos
- Fuentes
- Fusibles y Porta Fusibles
- Interlocks
- Multicontactos
- Probador de Voltaje y Corriente
- Reguladores de Voltaje
- Relevadores
- Switches
- Terminales
- Transformadores
- Timbres y Campanas
- Varistores y Termistores
- Ventiladores Energía
- Herramientas
- Iluminación
-
Proyectos y Robótica
- Adaptadores
- Aislantes y Soportes
- Arduino Genéricos
- Bases y Micas
- Baterías Robótica
- Buzzer
- Cajas para Proyectos
- Celdas Solares
- Conectores de Robótica
- Cristales
- Kits
- Engranes
- Extensiones de Robótica
- Carro Robot, Montajes
- Herramientas Proyectos
- Hoja de Símbolos o Master Circuit
- Imanes
- Joysticks
- Llantas
- Módulos
- Motores
- Optoelectrónica
- Pastilla Micrófonos
- Placas Circuito Impreso y Cloruro Férrico
- Potenciómetros y Presets
- Protoboard
- Raspberry
- Switches Proyectos
- Sensores
- Semiconductores
- Teclados
- Transformadores
- Wireless
- Semiconductores
- Tv y Video
- Telefonía
Artículos
Newsletter
Recibe promociones, descuentos y noticias.







Motor Reductor 6 V - 200 RPM / 3 V - 150 RPM
ROB0544

Descripción
Los reductores ó motorreductores son apropiados para el accionamiento de toda clase de máquinas y aparatos que necesitan reducir su velocidad en una manera segura y eficiente. Las transmisiones de fuerza por correa, cadena o trenes de engranajes que aún se usan para la reducción de velocidad presentan una regularidad perfecta tanto en la velocidad como en la potencia transmitida, mayor eficiencia en la transmisión de la potencia suministrada por el motor. Este motor reductor es ideal, para usar en los proyectos donde requieres girar una polea, un elevador o para las llantas de tu robot.
El OKY5022 es un motor que viene unido a una caja reductora con engranajes en su interior. Cuenta con dos ejes, uno de cada lado, que permiten no sólo la instalación de ruedas sino también ruedas ranuradas para encoders, que permiten leer la velocidad de giro del eje y así calcular la velocidad. Los motorreductores son apropiados para el accionamiento de toda clase de máquinas y aparatos que necesitan reducir su velocidad en una forma segura y eficiente.
- Engranaje de plástico
- Doble eje
- Peso ligero
- Material resistente
- Fácil de usar
- Aplicaciones: Proyectos de electrónica, robótica básica, vehículos un control remoto, etc.

Especificaciones
- Tipo: Motorreductor
- Dirección del eje: Bidireccional
- Reducción: 48:1
- Voltaje de alimentación mínima: 3 V
- Voltaje de alimentación máxima: 12 V
- Voltaje recomendado: 6 V
- Corriente sin carga (3 V): 150 mA
- Corriente sin carga (6 V): 200 mA
- Velocidad sin carga (3 V): 90 RPM + / - 10 %
- Velocidad sin carga (6 V): 200 RPM + / - 10 %
- Máximo torque: 800 gf.cm
- Números de ejes: 2
- Material: Plástico
- Color: Amarillo
- Dimensiones: 7 cm X1.8 cm X 2.2 cm
- Modelo: M1R +
- Modelo: OKY5022
- Modelo; C15 +
Funcionamiento
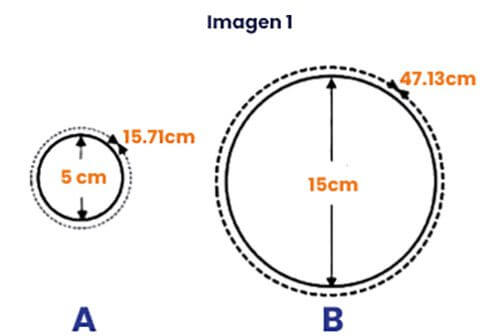
Como se muestra en la imagen 2 y 3, cuando gira la rueda “A” hará que a su vez gire la rueda “B” pero sucederá que por cada tres vueltas que dé “A”, la rueda “B” solamente dará una vuelta, esto es, el diámetro de “B” dividido por el diámetro de “A” (15/5 = 3). Este número 3 será la relación de reducción del motorreductor elemental y se indica como 3:1.
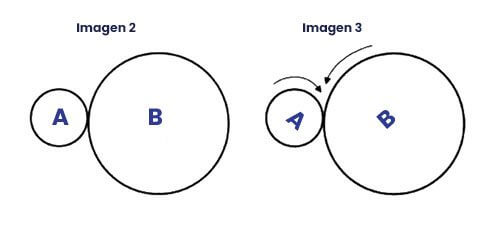
Con esta simple combinación se ha logrado disminuir la velocidad de rotación de la rueda “B” a la tercera parte de la velocidad de la rueda “A”. Si a la combinación de ruedas antes descrita encadenamos otras ruedas adicionales entonces cada vez lograremos una velocidad cada vez menor hasta donde sea necesario para la aplicación y puede ser 6:1, 30:1, 100:1 o aún mayor para lograr velocidades muy pequeñas que se pudieran necesitar y que, por ejemplo, la rueda “A” tuviera que girar cientos de veces para que la última rueda girará una sola vez.
En este caso tendremos un motorreductor de varios trenes de reducción, entendiendo como 1 tren de reducción a un par de ruedas.
Con este sistema de reducción no solamente disminuimos la velocidad de “B” a un giro más lento que es útil para la mayoría de las aplicaciones, sino que al mismo tiempo estaremos aumentado el “par” o “torque” en la última rueda del motorreductor que generalmente se conoce como la rueda de salida a la que va ensamblada la “flecha de salida” del reductor o motorreductor.
Conexión entre tarjetas de desarrollo
Si se conecta el motorreductor directamente a cualquier tarjeta de desarrollo pueden pasar alguna de estas situaciones:
- El motorreductor este inactivo
- Que funcione, pero se calienta el microcontrolador de la tarjeta de desarrollo
- Quemar el microcontrolador, por la demanda de corriente
Usos
- Robótica: Esencial para ruedas en plataformas robóticas, robots de sumo o seguidores de líneas
- Mecanismos: Ideal para mover poleas, engranes o pequeños elevadores
- Funcionamiento Flexible: Funciona a 3V (150 RPM) o 6V (200 RPM), ideal para microcontroladores como Arduino
- Diseño: Su caja reductora reduce la velocidad de un motor rápido a revoluciones útiles, incrementando la fuerza
- Opción de sensor: El diseño de doble eje permite a menudo instalar ruedas ranuradas para encoders y medir la velocidad
Productos Relacionados
-

Resistencia 1/2 Watt Varios Val...
$ 1.00 -

Resistencia 1 Watt Varios Valores
$ 4.00 -

Potenciómetro de Carbón 1 W sin...
$ 8.00 -

LED 5 mm Ultra Brillante Varios...
$ 2.00 -

Diodo Zener 1 W Varios Voltajes
$ 2.00 -

Resistencia 5 Watts Varios Valores
$ 10.00 -

Capacitor Electrolítico 10 µF V...
$ 3.00 -

LED 5 mm Difuso Varios Colores
$ 1.00 -

Capacitor Electrolítico 100 µF ...
$ 3.00 -

Fusible Térmico Varios Grados
$ 17.00 -

Capacitor Poliéster 100 nF (0.1...
$ 4.00 -

Capacitor Electrolítico 1 µF Va...
$ 3.00 -

NE555
$ 5.00 -

Capacitor Electrolítico 1000 µF...
$ 6.00 -

Capacitor Cerámico de 1000 V Va...
$ 5.00 -

74LS47 TTL Decodificador y Cont...
$ 18.00 -

74LS08 TTL Compuerta AND con Do...
$ 8.00 -

Transistor 2N3904BU Pequeña Señal
$ 2.00 -

74LS32 TTL Cuatro Compuertas OR...
$ 8.00 -

74LS04 TTL Compuerta NOT con 6 ...
$ 8.00 -

Capacitor Cerámico de 500 V Var...
$ 5.00 -

Capacitor Electrolítico 220 µF ...
$ 3.00 -

Diodo 1N4148 Recuperación Rápid...
$ 1.00 -

Capacitor Electrolítico 47 µF V...
$ 3.00 -

Resistencia 2 Watts Varios Valores
$ 5.00 -

Capacitor Electrolítico 470 µF ...
$ 5.00 -

Capacitor Electrolítico 2200 µF...
$ 9.00 -

Diodo Rectificador 1 A Varios V...
$ 1.00 -

LED 3 mm Ultra Brillante Transp...
$ 3.00 -
Display de 7 Segmentos Anodo Pi...
$ 6.00 -

Capacitor Electrolítico 22 µF V...
$ 3.00 -

LED 3 mm Difuso Varios Colores
$ 1.00 -

Fusible Americano Cristal Vario...
$ 3.00 -

Capacitor Cerámico de 50 V Vari...
$ 4.00 -

Porta Batería para 1 Pila 9 V d...
$ 4.00 -

Transistor 2N2222A Pequeña Señal
$ 19.00 -

Diodo Zener 0.5 W Varios Voltajes
$ 4.00 -

Potenciómetro de Carbón Doble 1...
$ 25.00 -

Fusible Europeo Cristal Varios ...
$ 3.00 -

Juego de 10 Cables Jumpers Mach...
$ 10.00 -

Resistencia 1/8 Watt Varios Val...
$ 3.00 -

74LS86 TTL Cuatro Compuertas OR...
$ 8.00 -

Base para Circuito Integrado 8 ...
$ 2.00 -

Fotoresistencia LDR GL5549
$ 2.00 -

Potenciómetro Trimpot 20 Vuelta...
$ 6.00 -

LED 10 mm Ultra Brillante Blanc...
$ 3.00 -

LM741CN
$ 12.00 -

LM324N
$ 7.00 -

Diodo DB3 (Diac)
$ 4.00

















































Comentarios