Categorías
- Audio
-
Automóvil
- Actuadores
- Adaptadores
- Alarmas y GPS
- Amplificadores
- Antenas
- Arneses
- Bocinas Auto
- Cargadores Auto
- CB
- Conectores de Automóvil
- Convertidores de Impedancia
- Epicentros
- Extensiones
- Focos y Porta Focos Automotriz
- Frentes o Soportes para Autoestereo
- Fusibles y Porta Fusibles Automotriz
- Inversores
- Kits Instalación
- Módulos LED Automóvil
- Supresor de Ruido
- Switches Automóvil
- Terminales Auto
- Transmisores FM y Bluetooth
- Cables
- Celulares
- Computación y Redes
-
Energía
- Abanicos y Aire Acondicionado
- Baterías
- Cargadores
- Cinta de Aislar
- Clavijas, Contactos y Adaptadores
- Conectores
- Elevadores y Reductores
- Extensiones
- Focos y Porta Focos
- Fuentes
- Fusibles y Porta Fusibles
- Interlocks
- Multicontactos
- Probador de Voltaje y Corriente
- Reguladores de Voltaje
- Relevadores
- Switches
- Terminales
- Transformadores
- Timbres y Campanas
- Varistores y Termistores
- Ventiladores Energía
- Herramientas
- Iluminación
-
Proyectos y Robótica
- Adaptadores
- Aislantes y Soportes
- Arduino Genéricos
- Bases y Micas
- Baterías Robótica
- Buzzer
- Cajas para Proyectos
- Celdas Solares
- Conectores de Robótica
- Cristales
- Kits
- Engranes
- Extensiones de Robótica
- Carro Robot, Montajes
- Herramientas Proyectos
- Hoja de Símbolos o Master Circuit
- Imanes
- Joysticks
- Libros
- Llantas
- Módulos
- Motores
- Optoelectrónica
- Pastilla Micrófonos
- Placas Circuito Impreso y Cloruro Férrico
- Potenciómetros y Presets
- Protoboard
- Raspberry
- Switches Proyectos
- Sensores
- Semiconductores
- Teclados
- Transformadores
- Wireless
- Semiconductores
- Tv y Video
- Telefonía
Artículos
Newsletter
Recibe promociones, descuentos y noticias.






Módulo Controlador de Motor a Pasos con Motor (ULN2003+28BYJ-48)
ROB0050
&media=//www.carrod.mx/cdn/shop/files/zzz.png_1_22879913-98db-42fb-bac1-d43793192a0e_1024x1024.png?v=1695239278 "Pin It")
Descripción
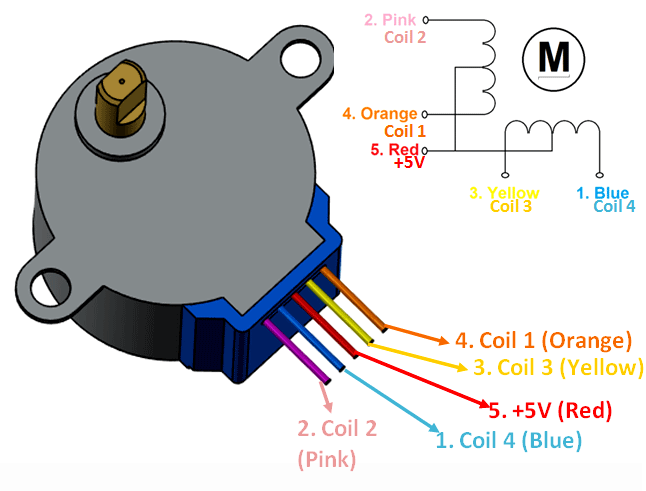
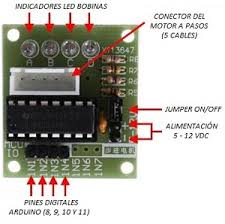
El motor paso a paso 28BYJ-48 es un dispositivo electromecánico paso a paso unipolar integrado por un driver o etapa de potencia basado en el chip ULN2003A. El motor ya viene con su modulo de control que esta basado en circuito integrado ULN2003, el cual permite controlar fácilmente el motor desde un microcontrolador ya sea con las tarjetas de desarrollo Arduino. Este módulo incorpora un zócalo de 5 cables donde se engancha el cable del motor paso a paso y 4 LED´S para indicar qué bobina está alimentada. Este componente nos permite suministrar la energía suficiente al motor paso a paso para que se mueva.es justo lo que estabas buscando si necesitas desarrollar proyectos escolares o profesionales, este motor puede ser utilizado en proyectos de robótica, domótica, electrónica, etc. Su tamaño reducido y su bajo costo lo hacen perfecto para utilizarlo el la construcción de seguidores de linea, mini sumos, pequeños robots de control, bandas transportadoras (pequeñas), etc. El motor funciona con el driver ULN2003 (viene incluido) y es compatible con cualquier tarjeta Arduino. Posee una reducción interna de 64:1 y funciona con 5 V. Si necesitas desarrollar proyectos que requieran una movilidad precisa, este motor es justo lo que necesitas.
El motor paso a paso es un dispositivo electromecánico que convierte una serie de impulsos eléctricos en desplazamientos angulares discretos, lo que significa que es capaz de avanzar una serie de grados (paso) dependiendo de sus entradas de control. El motor paso a paso se comporta de la misma manera que un conversor digital-analógico (D/A) y puede ser gobernado por impulsos procedentes de sistemas lógicos. Este motor presenta las ventajas de tener alta precisión y repetitividad en cuanto al posicionamiento.
- Motor a pasos unipolar
- Tiene un paso de 5.625 grados (64 pasos por vuelta)
- Frecuencia máxima es de 100 Hz, lo que supone unos 40 segundos por vuelta
- 4 LED's indicadores para cada salida
- Es compatible con las tarjetas Arduino
- Módulo con jumper para apagar o encender el motor
- Módulo y motor con orificios para sujetar
- Posee una fuerza de 0.3 Kgf•cm
- Con cables de conexión unidos al motor

Especificaciones
- Voltaje de alimentación: 5 V
- Corriente sin carga: 55 mA
- Número de fases: 4 (A;B;C;D)
- Torque en tracción: 34.3 mN·m (349.8 gf·cm)
- Ángulo de paso: 5.625 x 1/64
- Relación de reducción: 1/64
- Resistencia de CC : 200 Ω ± 7 % ( 25 °C )
- Resistencia de aislamiento: > 10 M ( 500 V )
- Rigidez dieléctrica : 600 V / 1 mA / 1s
- Frecuencia en tracción: > 600Hz
- Frecuencia sin tracción: > 1000 Hz
- Resistencia nominal de cada bobina: 50 Ω
- Ruido: <40dB (120Hz, sin carga, 10 cm)
- Arrastre en torque: 300 gf.cm
- Torque
- Con tracción: >34,3mN.m (120Hz)
- En auto posicionamiento: >34,3mN.m
- Con fricción: 600-1200 gf.cm
- Delay :10 ms
- Largo de cable: 23 cm
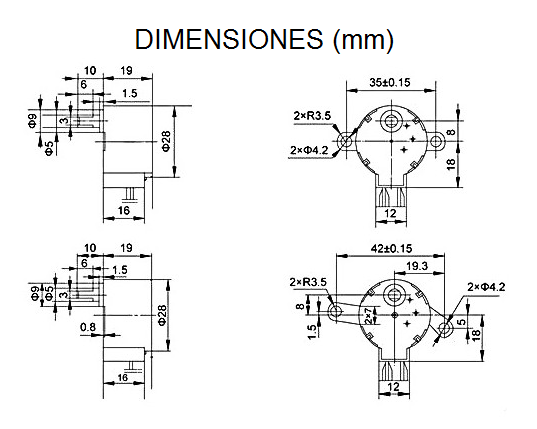
- Diámetro del eje: 5 mm con lados planos de 3 mm
- Número de cables: 5
- Dimensiones placa: 29 mm X 21mm
- Material motor: Metálico
- Modelo: F6 + F13 +
- Modelo: OKY3193
Incluye
- Módulo con CI ULN2003
- Motor paso a paso de 5 hilos 28BYJ-48
Documentación
Nota: La placa del dispositivo tiene la opción para seleccionar el voltaje de funcionamiento (5V o 12V), si requieres alimentar al motor desde alguna placa de desarrollo , se requerirá puentear las conexiones con un jumper.
Productos Relacionados
-

Ventilador de Plástico 12V, 120...
$ 235.00 -

Transistor 2SD1251 TO220
$ 14.00 -

Transistor 2SC5027-O TO220
$ 14.00 -

Transistor 2SC5020 TO220
$ 14.00 -

Transistor 2SC4370 TO220
$ 12.00 -

Transistor 2SD315 TO220
$ 14.00 -

Transistor 2SD1406 TO220
$ 12.00 -

Juego de Engranes y Ejes
$ 65.00 -

Transistor 2SC1985 TO220
$ 35.00 -

Transistor 2SC1816 TO220
$ 25.00 -

Transistor 2SC1761 TO220
$ 22.00 -

Transistor 2SC1505 TO220
$ 18.00 -

Transistor 2SC1226 TO220
$ 29.00 -

Transistor 2SB856 TO220
$ 12.00 -

Transistor 2SB1342 TO220
$ 16.00 -

Transistor 2SB1366 TO220
$ 15.00 -

Transistor 2SB596 TO220
$ 16.00 -

Transistores 2SA770 TO220
$ 20.00 -

Transistores 2SA1837 TO220
$ 50.00 -

Transistor 2SC3293 TO220
$ 15.00 -

Módulo GPRS GSM SIM800 con Antena
$ 129.00 -

Transistor 2SC3229 TO220
$ 20.00 -

Transistor 2SC3183 TO220
$ 33.00 -

Transistor 2SC2491 TO220N
$ 33.00 -

Transistor 2SC1124 TO220N
$ 45.00 -

Transistor 2SB1299 TO220F
$ 20.00 -

Transistor 2SB1273 TO220
$ 16.00 -

Transistor 2SA671 TO220
$ 16.00 -

Transistor 2SA1601 TO220F
$ 42.00 -

Alcohol Isopropílico 250 ml
$ 95.00 -

Fuente de Alimentación Interio...
$ 620.00 -

Capacitor de Marcha 3.5 µF 250 VCA
$ 75.00 -

HEF40106BT 6 Inversores Schmitt...
$ 45.00 -

TNY264PN
$ 54.00 -

Multímetro Digital Profesional
$ 150.00 -

L7909CV
$ 15.00 -

Clavija Eléctrica Monofásica no...
$ 17.00 -

Switch Palanca 20A/125V 15A/250...
$ 220.00 -

Ventilador Metálico 24 V, 120 m...
$ 450.00 -

Jack Invertido 2.1 mm X 5.5 mm ...
$ 9.00 -

Relevador 12 V 30 A 1 Polo 1 Ti...
$ 290.00 -

LT11721N8
$ 230.00 -

Pegamento Adhesivo T-7000
$ 110.00 -

Módulo de 1 Relevador 12 V con ...
$ 79.00 -

FS5UM18A Mosfet TO220 CH-N 1900...
$ 169.00 -

XPT9911
$ 39.00 -

PIC16F54-I/P CMOS Microcontrola...
$ 45.00 -

Transistor NJW0281G Potencia
$ 70.00 -

Aire Comprimido Naceb 660 ml
$ 178.00

















































Comentarios